在ad max推送6.0.0 beta版万人公测之后的半个月,理想开了一场春季发布会。主要讲了几件事,第一件事无图noa功能在7月内全量推送,不再是测试版了,ad max用户全都能用;全自动aes和低速aeb,也是7月内推送。第二件事拿了发布会大概三分之二的时间,来阐述理想的端到端技术。
两件事做个总结,理想想说的是什么。
自研无图的城区noa功能,也就是理想的第二代智能驾驶技术,去掉了npn之后在7月份全部ad max版本可以使用了,只要有导航就哪里都可以开;而之后,理想第三代智能驾驶功能的迭代,会有端到端 vlm双系统,感知更好、反应更快的一套智能驾驶技术,执行效率更高(理论上是可以支持部分l3级别功能,但发布会上没怎么提)。
那么看完发布会之后,我们感知到的是什么。
在华为之后,理想在7月份会落地全国的无图noa功能,小鹏的xos 5.2.0此时还在招募;从功能性上来看,理想追平了华为的智能驾驶功能(7月份推送后),目前排在了第二名的位置。再往后的技术迭代,是朝着特斯拉fsd的方向去的。
全量推送之前,beta版跑的怎么样?

这次给ad max用户推的理想汽车最新的无图noa功能,不管是在城市、城镇,还是二级道路,都能够行驶。这个版本的智能驾驶功能,相比于之前的版本,bev、感知能力、规控能力,还有整体系统的能力都提升了,对环境的复杂程度也没那么多限制了。
发布会上,提到的几个核心信息:
1.哪里都能开,不再依赖过多“先验信息”;
2.绕行动作丝滑,时空联合;
3.复杂路口轻松过,上帝视角;
4.做了aes和低速aeb,安全上别担心。
这是发布会上半场的部分信息,大概用时30分钟以内,没占用太多时间,因为这不是重点,只要7月内把功能全量推出就行了。至于ad max 6.0.0版本到底好不好用,也都公测有一段时间了,我们在beta 4版本(应该比较接近量产版)上差不多也都体验出来了。

首先说,它的驾驶策略不是保守那一挂的,挺激进的。然后,再说一个它是真无图的佐证,前面的激进也不算夸,只是个人比较喜欢这种风格,但在这种驾驶风格之下,是并线有空就尽可能的去并,偶会压实线、选择错路线或者错过路口。这基本就是一个无图智驾可能会出现的“失误”。
接着是一些beta 4版本中的体验感受。
城市道路使用这个功能的时候,可能是系统设定的原因,喜欢走外侧车道而非最内侧车道;右转弯的时候,无论路口转弯开角大或小,都会习惯向左侧打一把方向再通过,其实有时候没什么必要;绿灯路口起步,起步之后偶发性的会慢下来观察、等待,然后再次通行(逻辑上不太顺);至少在测试版上,换到路段偶尔会降级到lcc,可能是覆盖面不够。

最后两个连起来说,第一就是无图带来的择路失误,或者是错过最终目的地的入口等;第二是在错过目的地、路口之后,刹车力度会有接近全力刹车的制动感受(可能知道错过目的地或者走过路口了,突然反应过来了)。
小结理想无图noa,能干的事参考华为ads 2.0吧,主要功能差不多。但还是像我之前说的,华为的ads 2.0厉害的点,是在整体功能做出来之后的细节处理能力更好,以及发展到现在的园区开放环境泊车入位场景贯穿做的不错。
但理想这波ad max 6.0.0功能的全量推送,虽然没有做出场景贯穿,但基础的城区路面上的操作都有了,已经很不错了。最终的推送版本具体如何,我们现在也还都停留在“理论上”即便beta 4接近量产版,但还是要等实测量产版之后,再对这套智能驾驶系统做评价。
双系统,打通更多场景贯穿?

从发布会内容的篇幅来看,下半年端到端 drive vlm方案才是理想接下来要忙的重点。重点是接下来的one model(特斯拉这种)端到端智驾方案,由车端系统1、系统2以及云端模型组成。系统1是端到端模型用来快速响应常规问题;而系统2是为vlm视觉语言模型包含思考能力,用世界模型用来验证系统1和系统2的能力。
概括,下一代方案会拥有更高效、拟人、迭代快的特点。
理想汽车的自动驾驶技术由三个关键系统组成:
1.端到端模型(e2e)、视觉语言模型(vlm)和世界模型;
2.系统1由e2e模型实现,能够快速响应常规驾驶问题;
3.系统2由vlm实现,具备思考和推理能力;
4.而世界模型则在云端进行验证,确保整体系统的安全和可靠。
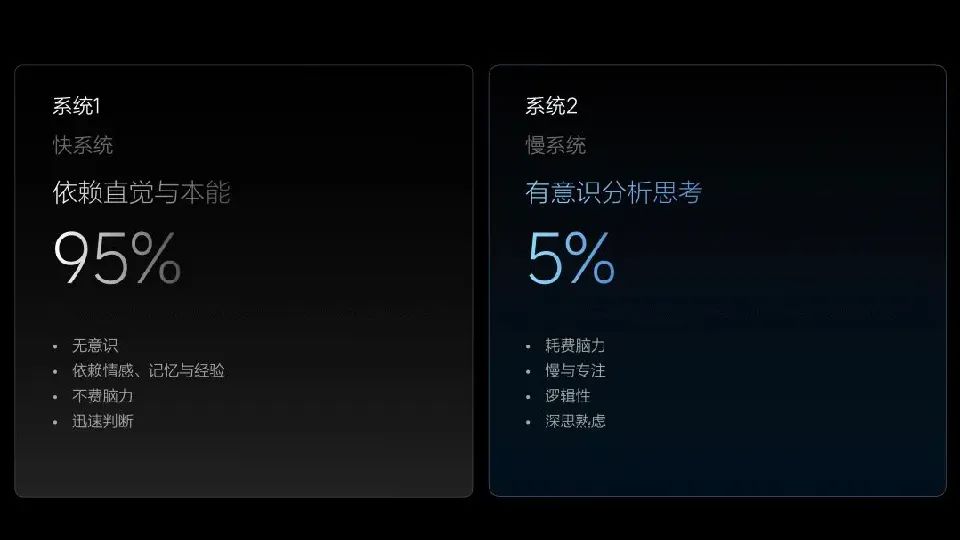
说直白点,这是一套从现有方案,到one model方案的过度方案,因为数据和算力不够。发布会上提到了一个事,两套系统,分别处理95%和5%的功能(如果算力和数据都够的话,就不差这5%了)。最终方案走向,就是具备像特斯拉一样的神经网络功能。
下一代的方案,是基于bev的端到端大模型跑主流程的辅助驾驶;额外用dirvevlm 模型,检测影响自动驾驶的物体,给端到端做兜底,解决泛化问题。两套模型共同使用,跑城市无图noa。用端到端做更高的上限,智驾体验更像人类驾驶员;然后drive vlm主要还是去辅助端到端,来解决复杂路口下的工况处理。估计目前内测的版本应该就已经用上了drive vlm只不过没小范围公测。
这套方案主要升级的功能,主要是城区noa功能已经其他功能的贯穿使用,可以理解为城区noa的升级版(还不能算是完全版),类似于2年前的高速noa和现在的高速noa的区别与好用程度。

例如,打通城区noa 泊车端的贯穿,用系统1实现端到端的能力把车开到指定地点,再用系统2来处理类似于进入园区、停车场这些需要“看图说话”的复杂场景内;之后就是泊车域了,主要是打通城区到泊车车位之间的这个工况。这也是之后one model方案下必须拥有的一个贯穿功能,因为之后的所有功能都在是在一个模型下进行处理的。
而如果要对标华为ads 3.0的话,它也是god和pdp两个网络来做的,一个负责感知一个负责预判和规划,和one model也不一样。至少目前来看,理想追平了华为ads 2.0智能驾驶方案的部分属性,而且下一代智驾版本的迭代路线和华为也差不多。
作者丨路咖汽车
原文标题 : 理想智驾,功能追平华为?